Quickstart to torchdyn¶
torchdyn is a PyTorch library dedicated to neural differential equations and equilibrium models.
Central to the torchdyn approach are continuous and implicit neural networks, where depth is taken to its infinite limit.
This notebook serves as a gentle introduction to NeuralODE, concluding with a small overview of torchdyn features.
[1]:
from torchdyn.core import NeuralODE
from torchdyn.datasets import *
from torchdyn import *
%load_ext autoreload
%autoreload 2
[2]:
# quick run for automated notebook validation
dry_run = False
Generate data from a static toy dataset¶
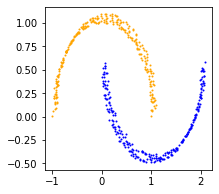
We’ll be generating data from toy datasets. In torchdyn, we provide a wide range of datasets often use to benchmark and understand Neural ODEs. Here we will use the classic moons dataset and train a Neural ODE for binary classification
[3]:
d = ToyDataset()
X, yn = d.generate(n_samples=512, noise=1e-1, dataset_type='moons')
[4]:
import matplotlib.pyplot as plt
colors = ['orange', 'blue']
fig = plt.figure(figsize=(3,3))
ax = fig.add_subplot(111)
for i in range(len(X)):
ax.scatter(X[i,0], X[i,1], s=1, color=colors[yn[i].int()])
Generated data can be easily loaded in the dataloader with standard PyTorch calls
[5]:
import torch
import torch.utils.data as data
device = torch.device("cpu") # all of this works in GPU as well :)
X_train = torch.Tensor(X).to(device)
y_train = torch.LongTensor(yn.long()).to(device)
train = data.TensorDataset(X_train, y_train)
trainloader = data.DataLoader(train, batch_size=len(X), shuffle=True)
We utilize Pytorch Lightning to handle training loops, logging and general bookkeeping. This allows torchdyn and Neural Differential Equations to have access to modern best practices for training and experiment reproducibility.
In particular, we combine modular torchdyn models with LightningModules via a Learner class:
[6]:
import torch.nn as nn
import pytorch_lightning as pl
class Learner(pl.LightningModule):
def __init__(self, t_span:torch.Tensor, model:nn.Module):
super().__init__()
self.model, self.t_span = model, t_span
def forward(self, x):
return self.model(x)
def training_step(self, batch, batch_idx):
x, y = batch
t_eval, y_hat = self.model(x, t_span)
y_hat = y_hat[-1] # select last point of solution trajectory
loss = nn.CrossEntropyLoss()(y_hat, y)
return {'loss': loss}
def configure_optimizers(self):
return torch.optim.Adam(self.model.parameters(), lr=0.01)
def train_dataloader(self):
return trainloader
Define a Neural ODE¶
Analogously to most forward neural models we want to realize a map
where \(\hat y\) becomes the best approximation of a true output \(y\) given an input \(x\). In torchdyn you can define very simple Neural ODE models of the form
by just specifying a neural network \(f\) and giving some simple settings.
Note: This Neural ODE model is of depth-invariant type as neither \(f\) explicitly depend on \(s\) nor the parameters \(\theta\) are depth-varying. Together with their depth-variant counterpart with \(s\) concatenated in the vector field was first proposed and implemented by [Chen T. Q. et al, 2018]
Define the vector field (DEFunc)¶
The first step is to define any PyTorch torch.nn.Module. This takes the role of the Neural ODE vector field \(f(h,\theta)\)
[16]:
f = nn.Sequential(
nn.Linear(2, 16),
nn.Tanh(),
nn.Linear(16, 2)
)
t_span = torch.linspace(0, 1, 5)
In this case we chose \(f\) to be a simple MLP with one hidden layer and \(\tanh\) activation
Define the NeuralDE¶
The final step to define a Neural ODE is to instantiate the torchdyn’s class NeuralDE passing some customization arguments and f itself.
In this case we specify: * we compute backward gradients with the 'adjoint' method. * we will use the 'dopri5' (Dormand-Prince) ODE solver from torchdyn, with no additional options;
[17]:
model = NeuralODE(f, sensitivity='adjoint', solver='dopri5').to(device)
Your vector field callable (nn.Module) should have both time `t` and state `x` as arguments, we've wrapped it for you.
Train the Model¶
With the same forward method of NeuralDE objects you can quickly evaluate the entire trajectory of each data point in X_train on an interval t_span
[18]:
t_span = torch.linspace(0,1,100)
t_eval, trajectory = model(X_train, t_span)
trajectory = trajectory.detach().cpu()
The numerical method used to solve a NeuralODE have great effect on its speed. Try retraining with the following
[23]:
f = nn.Sequential(
nn.Linear(2, 16),
nn.Tanh(),
nn.Linear(16, 2)
)
model = NeuralODE(f, sensitivity='adjoint', solver='rk4', solver_adjoint='dopri5', atol_adjoint=1e-4, rtol_adjoint=1e-4).to(device)
learn = Learner(t_span, model)
if dry_run: trainer = pl.Trainer(min_epochs=1, max_epochs=1)
else: trainer = pl.Trainer(min_epochs=200, max_epochs=300)
trainer.fit(learn)
GPU available: True, used: False
TPU available: False, using: 0 TPU cores
| Name | Type | Params
------------------------------------
0 | model | NeuralODE | 82
------------------------------------
82 Trainable params
0 Non-trainable params
82 Total params
0.000 Total estimated model params size (MB)
Your vector field callable (nn.Module) should have both time `t` and state `x` as arguments, we've wrapped it for you.
Plot the Training Results¶
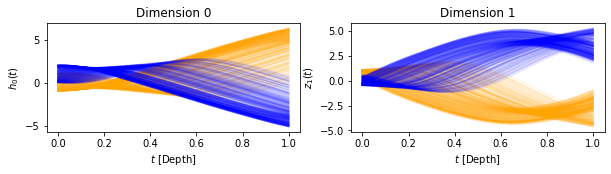
We can first plot the trajectories of the data points in the depth domain \(s\)
[24]:
t_eval, trajectory = model(X_train, t_span)
trajectory = trajectory.detach().cpu()
[25]:
color=['orange', 'blue']
fig = plt.figure(figsize=(10,2))
ax0 = fig.add_subplot(121)
ax1 = fig.add_subplot(122)
for i in range(500):
ax0.plot(t_span, trajectory[:,i,0], color=color[int(yn[i])], alpha=.1);
ax1.plot(t_span, trajectory[:,i,1], color=color[int(yn[i])], alpha=.1);
ax0.set_xlabel(r"$t$ [Depth]") ; ax0.set_ylabel(r"$h_0(t)$")
ax1.set_xlabel(r"$t$ [Depth]") ; ax1.set_ylabel(r"$z_1(t)$")
ax0.set_title("Dimension 0") ; ax1.set_title("Dimension 1")
[25]:
Text(0.5, 1.0, 'Dimension 1')
Then the trajectory in the state-space
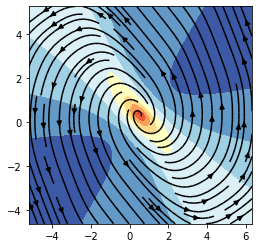
As you can see, the Neural ODE steers the data-points into regions of null loss with a continuous flow in the depth domain. Finally, we can also plot the learned vector field \(f\)
[26]:
# evaluate vector field
n_pts = 50
x = torch.linspace(trajectory[:,:,0].min(), trajectory[:,:,0].max(), n_pts)
y = torch.linspace(trajectory[:,:,1].min(), trajectory[:,:,1].max(), n_pts)
X, Y = torch.meshgrid(x, y) ; z = torch.cat([X.reshape(-1,1), Y.reshape(-1,1)], 1)
f = model.vf(0,z.to(device)).cpu().detach()
fx, fy = f[:,0], f[:,1] ; fx, fy = fx.reshape(n_pts , n_pts), fy.reshape(n_pts, n_pts)
# plot vector field and its intensity
fig = plt.figure(figsize=(4, 4)) ; ax = fig.add_subplot(111)
ax.streamplot(X.numpy().T, Y.numpy().T, fx.numpy().T, fy.numpy().T, color='black')
ax.contourf(X.T, Y.T, torch.sqrt(fx.T**2+fy.T**2), cmap='RdYlBu')
[26]:
<matplotlib.contour.QuadContourSet at 0x7f11ed2d5e50>
Sweet! You trained your first Neural ODEs! Now you can proceed and learn about more advanced models with the next tutorials
More about torchdyn¶
[46]:
import time
from torchdyn.numerics import Euler, RungeKutta4, Tsitouras45, DormandPrince45, MSZero, Euler, HyperEuler
from torchdyn.numerics import odeint, odeint_mshooting, Lorenz
from torchdyn.core import ODEProblem, MultipleShootingProblem
But wait! torchdyn has way more than NeuralODEs. If you wish to solve generic differential equations parallelizable both in space (initial conditions) as well in time, with parallel, but do not need neural networks inside the vector field, you can use our functional API like so:
[47]:
x0 = torch.randn(8, 3) + 15
t_span = torch.linspace(0, 3, 2000)
sys = Lorenz()
[48]:
t0 = time.time()
t_eval, accurate_sol = odeint(sys, x0, t_span, solver='dopri5', atol=1e-6, rtol=1e-6)
accurate_sol_time = time.time() - t0
t0 = time.time()
t_eval, base_sol = odeint(sys, x0, t_span, solver='euler')
base_sol_time = time.time() - t0
t0 = time.time()
t_eval, rk4_sol = odeint(sys, x0, t_span, solver='rk4')
rk4_sol_time = time.time() - t0
t0 = time.time()
t_eval, dp5_low_sol = odeint(sys, x0, t_span, solver='dopri5', atol=1e-3, rtol=1e-3)
dp5_low_time = time.time() - t0
t0 = time.time()
t_eval, ms_sol = odeint_mshooting(sys, x0, t_span, solver='mszero', fine_steps=2, maxiter=4)
ms_sol_time = time.time() - t0
Alternatively, you can wrap your vector field in a specific *Problem to perform sensitivity analysis and optimize for terminal as well as integral objectives:
[52]:
prob = ODEProblem(sys, sensitivity='interpolated_adjoint', solver='dopri5', atol=1e-3, rtol=1e-3,
solver_adjoint='tsit5', atol_adjoint=1e-3, rtol_adjoint=1e-3)
t0 = time.time()
t_eval, sol_torchdyn = prob.odeint(x0, t_span)
t_end1 = time.time() - t0
Our numerics suite includes other tools, such as a odeint_hybrid for hybrid systems (potentially stochastic and multi-mode). We have built our numerics suite from the ground up to be compatible with hybridized methods such as hypersolvers, where a base solver works in tandem with neural approximators to increase accuracy while retaining improved extrapolation capabilities. In fact, these methods can be called from the same API:
[40]:
class VanillaHyperNet(nn.Module):
def __init__(self, net):
super().__init__()
self.net = net
for p in self.net.parameters():
torch.nn.init.uniform_(p, 0, 1e-5)
def forward(self, t, x):
return self.net(x)
[43]:
net = nn.Sequential(nn.Linear(3, 64), nn.Softplus(), nn.Linear(64, 64), nn.Softplus(), nn.Linear(64, 3))
hypersolver = HyperEuler(VanillaHyperNet(net))
t_eval, sol = odeint(sys, x0, t_span, solver=hypersolver) # note: this has to be trained!
We also provide an extensive set of tutorial subdivided into modules. Each tutorials deals with a specific aspect of continuous or implicit models, or showcases applications (control, generative modeling, forecasting, optimal control of ODEs and PDEs, graph node classification). Check torchdyn/tutorials for more information.
